
ich benutze diese lib hier: https://github.com/jrowberg/i2cdevlib/t ... no/MPU6050
wen ich die den chip mit der DMP funktion benutze driftet das sample sketch massiv, fast nur zufalszahlen.
Wen ich darauf verzichte und nur die raw werte ausgebe sieht das ganze eigentlich fast ok aus.
Nur kann ich mich erinnern die Chips waren sonst nicht so S***, habe leider kein freien zum testen.
Was ich bei dem Aufbau gepfuscht habe ist folgendes:
ich habe den chip auf si einem breakout board:
https://robu.in/wp-content/uploads/2014 ... sensor.png
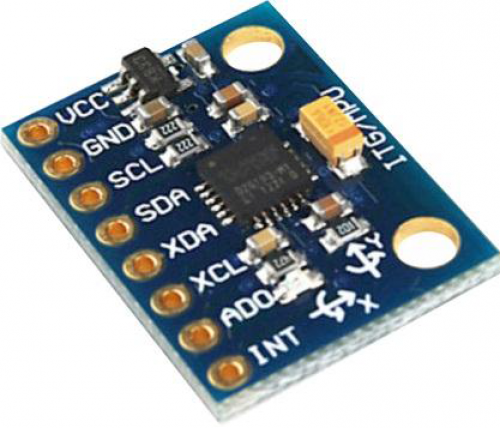{kind=link}
da habe ich die grüne LED ausgelötet und benutze die 3.3v um damit ein anderes breakout board mit einem NRF52 zu betreiben, solte halt kompakt sein.
http://aconno.de/wp-content/uploads/201 ... 53x300.png
{kind=link}
Dazu sind die beiden Platinen frot zu front also der gyro ship auf die metal box der anderen direkt geklebt, solte halt kompakt sein.
Nun meine frage ist es wahrscheinlich das
1. der NRF52 zu viel saft zieht und der MPU das nicht mag wen ihm ab und zu die versorgung etwas einbricht (wobei der hat in der nähe nen fetten kondensator )
2. das bluetooth so nahe an dem gyro chip ist ne ganz besch**** idee wegen der ganzen RF leistung
3. was anderes?
Ich würde das ganze jetzt eher ungern auf verdacht auseinander frimeln da ich noch ne dritte paltine (lipo lader) und alles ist shcon mit heiskleber zusamen geklebt