Hey, ich brauche euren Rat.
Geplant ist eine kleine 4x4 Roboterplattform mit 28cm Bereifung und Abmessungen von ca 60*60cm. Ich rechne so ca. mit 4kg Rahmen, 4kg Reifen, 4kg Antrieb, 2-5kg Batterie. Fest steht damit die Abmessungen sowie das ungefähre Gewicht.
Das Ding soll Mal mit so ca. 10kmh Höchstgeschwindigkeit rollen. Ohne Untersetzung komm ich bei der Reifengröße auf ca. 200 upm.
Das Ding soll erstmal als Spielzeug dienen mittels Smartphone Steuerung und später ggf Mal mit Sensorik alleine seinen Weg finden. Cool wäre der Einsatz zum Schneeschippen im Winter.
Offen
Ich kann das erforderliche Drehmoment leider nicht wirklich abschätzen. Habt ihr da Erfahrungswerte?
2 Motoren oder 4 Motoren? Vermutlich macht's gewichtsmäßig nicht viel aus ob extra Motoren bzw. Zahnriemen/Kette zwischen den Rädern verbaut werden.
Motoren mit 12/24VDC?
Motorentyp? Ich hab da mal an Scheibenwischermotoren gedacht. Die sind ziemlich günstig. Da gibt's 40w, 220 upm, max. Drehmoment 30nm für ca 35€.
https://www.ebay.de/itm/Schneckengetrie ... 3441697091
Habt ihr Tipps für die Energieversorgung? 6s Lipo mit 22v/10000mah oder lieber einen Bleiklotz?
Ich freu mich auf Beiträge.
4x4 Roboterplattform
Moderatoren: Heaterman, Finger, Sven, TDI, Marsupilami72, duese

Re: 4x4 Roboterplattform
ich würde die radmotoren aus Hoverboards nehmen. Bei den 10,- Boards hast du schonmal alle vier Räder plus motoren für 20,-
Ansteuerung wird dann natürlich etwas intressanter
Ansteuerung wird dann natürlich etwas intressanter

Re: 4x4 Roboterplattform
4kg Antrieb erscheint mir unrealistisch niedrig.
Zur Antriebskraft: übliche KFZ haben eine Steigfähigkeit irgendwo bei 30%. Das wäre hier evtl auch anzustreben.
Das heißt überschlägig: 30% des Gewichts greifen am Radius des Rads an. Bei 20kg müssen also alle angetriebenen Räder zusammen 6kg, also ~60N in Richtung "vorne" bringen. Bei 28cm Reifen (r=0,14m) ergibt das ein Drehmoment von 8,4 Nm. Jeder Motor müsste dann 2,1Nm bringen...
Die daraus folgende Gesamtleistung bei der gegebenen Geschwindigkeit wäre bei 3m/s (~10km/h) 180Nm/s=180W.
Diese Werte sind auch in Relation zu den Angaben des Getriebemotors zu setzen; dabei kommt nicht viel sinnvolles raus. 30Nm Drehmoment ist auch schon 1/3 PKW-Motor!
Ich denke, dass es mit den Motoren trotzdem funktionieren könnte, da wir diese Steigfähigkeit nur kurzzeitig brauchen. Vier Stück solltens dann aber schon sein.
Zur Antriebskraft: übliche KFZ haben eine Steigfähigkeit irgendwo bei 30%. Das wäre hier evtl auch anzustreben.
Das heißt überschlägig: 30% des Gewichts greifen am Radius des Rads an. Bei 20kg müssen also alle angetriebenen Räder zusammen 6kg, also ~60N in Richtung "vorne" bringen. Bei 28cm Reifen (r=0,14m) ergibt das ein Drehmoment von 8,4 Nm. Jeder Motor müsste dann 2,1Nm bringen...
Die daraus folgende Gesamtleistung bei der gegebenen Geschwindigkeit wäre bei 3m/s (~10km/h) 180Nm/s=180W.
Diese Werte sind auch in Relation zu den Angaben des Getriebemotors zu setzen; dabei kommt nicht viel sinnvolles raus. 30Nm Drehmoment ist auch schon 1/3 PKW-Motor!
Ich denke, dass es mit den Motoren trotzdem funktionieren könnte, da wir diese Steigfähigkeit nur kurzzeitig brauchen. Vier Stück solltens dann aber schon sein.

Re: 4x4 Roboterplattform
Re: 4x4 Roboterplattform
Projekte und Misserfolge...
Vor allem Misserfolge ("Wenn ich mein Rennauto anders übersetze, fährt es schneller!"). Am Ende hatte ich das Ding auf 10000 U/min Nenndrehzahl auf den Rädern... dann musste man mal nachdenken.
Und Physik-LK.
Vor allem Misserfolge ("Wenn ich mein Rennauto anders übersetze, fährt es schneller!"). Am Ende hatte ich das Ding auf 10000 U/min Nenndrehzahl auf den Rädern... dann musste man mal nachdenken.
Und Physik-LK.
Re: 4x4 Roboterplattform
Scheibenwischermotoren würde ich nicht nehmen.
Die haben einen sehr geringen Wirkungsgrad, werden damit sehr heiß und sind nicht für Dauerbetrieb geeignet.
So meine Erfahrung mit den Exemplaren von Doga (auch wenn da Dauerbetrieb im Datenblatt steht und laut Hersteller
110 Grad Celsius am Gehäuse zulässig sind)
Ich/wir haben die dienstlich einsetzen wollen, weil sie kostengünstig waren (deren einziger Vorteil).
Und hatten dann recht viel Ärger.
Zudem werden die Motoren noch etwas heißer, wenn man sie mit PWM ansteuert...
Die haben einen sehr geringen Wirkungsgrad, werden damit sehr heiß und sind nicht für Dauerbetrieb geeignet.
So meine Erfahrung mit den Exemplaren von Doga (auch wenn da Dauerbetrieb im Datenblatt steht und laut Hersteller
110 Grad Celsius am Gehäuse zulässig sind)
Ich/wir haben die dienstlich einsetzen wollen, weil sie kostengünstig waren (deren einziger Vorteil).
Und hatten dann recht viel Ärger.
Zudem werden die Motoren noch etwas heißer, wenn man sie mit PWM ansteuert...
Re: 4x4 Roboterplattform
Was vergessen:
Gute Getriebemotoren in der Leistungsklasse > 100W sind neu recht teuer.
Wenn es um Fahrantriebe geht und keine Neuteile gefordert sind, fallen mir folgende Quellen ein:
- Rollstuhlantrieb
- Elektromobile für Gehbehinderte ("Rentner-Ferrari")
- E-Bike-Motor
- Elektrospielzeuge zur Personenfortbewegung (das Hoverboard wurde schon genannt, Segway noch nicht, Elektroroller auch nicht)
- Autoscooter (Jahrmarkt)
Die Eignung der Antriebe sollte man vorher anhand von Daten / Erfahrungen prüfen.
Zudem würde ich die Akkuspannung nach dem Antrieb auslegen.
Gute Getriebemotoren in der Leistungsklasse > 100W sind neu recht teuer.
Wenn es um Fahrantriebe geht und keine Neuteile gefordert sind, fallen mir folgende Quellen ein:
- Rollstuhlantrieb
- Elektromobile für Gehbehinderte ("Rentner-Ferrari")
- E-Bike-Motor
- Elektrospielzeuge zur Personenfortbewegung (das Hoverboard wurde schon genannt, Segway noch nicht, Elektroroller auch nicht)
- Autoscooter (Jahrmarkt)
Die Eignung der Antriebe sollte man vorher anhand von Daten / Erfahrungen prüfen.
Zudem würde ich die Akkuspannung nach dem Antrieb auslegen.
-
Heaterman

- Beiträge: 3990
- Registriert: Fr 28. Jun 2013, 10:11
- Wohnort: Am Rand der Scheibe, 6 m unter NN
Re: 4x4 Roboterplattform
Also, ich hab einen ersten provisorischen Probelauf mit der geplanten Hoverboard-Plattform für meine Holde durch. Drei Hoverboard-Motoren (die haben wohl jeweils 350 W??) auf Schubkarrenräder gespaxt, bewältigen das Stahlgestell, mit ca. 50 kg Nutzlast belastet, problemlos im sumpfigen und mit ein paar Steigungen versehenen Garten. Nur an unseren ziemlich hohen Bordsteinen auf der Straße versagt er noch. Geht nur mit Anlauf, da dürfte Chefins Laubkorb aber abgeworfen werden. Also entweder größeres Vorderrad oder ein weiteres Schwenkrad wie so ein Treppensteiger.
Quintessenz: diese billigen Hoverboard-Dinger gehen sehr gut für sowas. Bisher hatte ich nur einen einzigen kaputten Hallsensor.
Wenn man keine Original-Antriebssteuerung hat, nimmt man eben eine 0815-BLDC-Steuerung.
Mit dem Drehmoment, das die Hoverboard-Motoren entwickeln, könnte man ja auch kleine Gummi-Ketten antreiben...
Quintessenz: diese billigen Hoverboard-Dinger gehen sehr gut für sowas. Bisher hatte ich nur einen einzigen kaputten Hallsensor.
Wenn man keine Original-Antriebssteuerung hat, nimmt man eben eine 0815-BLDC-Steuerung.
Mit dem Drehmoment, das die Hoverboard-Motoren entwickeln, könnte man ja auch kleine Gummi-Ketten antreiben...

Re: 4x4 Roboterplattform
Heaterman, wir brauchen Bilder davon. Und Filme. Und Schaltpläne und Zeichnungen. Das klingt alles sehr gut.
-
Geistesblitz

- Beiträge: 1934
- Registriert: Di 5. Nov 2013, 17:53
- Wohnort: Dresden
Re: 4x4 Roboterplattform
Das würde ich auch gerne sehen, vor allem wie du das genau mit den Schubkarrenrädern hinbekommen hast. Hatte deswegen ja auch schon im Hoverboard-Faden gefragt gehabt.
Da müsstest aber mit dem Gewicht nochmal neu rechnen, so ein Hoverboardrad wiegt alleine schon gute 3kg, also für 4 Stück sinds dann 12kg zusammen. Und ich hab da welche von den 6"-Boards, kann sein, dass die Größeren nochmal ein anderes Gewicht haben.
Da müsstest aber mit dem Gewicht nochmal neu rechnen, so ein Hoverboardrad wiegt alleine schon gute 3kg, also für 4 Stück sinds dann 12kg zusammen. Und ich hab da welche von den 6"-Boards, kann sein, dass die Größeren nochmal ein anderes Gewicht haben.
Re: 4x4 Roboterplattform
Hallo Zusammen,
danke für die vielen Antworten
@MichelH
Gibts das Angebot von den 20€ Hoverboards noch?
Das wären dann halt Brushlessmotoren, interessanter
@ferdimh
Danke für deine Einschätzung. Damit kann ich mal echt was anfangen.
Basierend auf deiner Erklärung hab ich auch mal ein bisschen mit den Zahlen gespielt und bin zu dem Ergebnis gekommen dass die Getriebemotoren nicht so das geeignete sind.
@sysconsol
Danke für deine Erfahrungsbericht zu den Scheibenwischermotoren, die sind damit wohl gestorben.
@Heaterman
Bilder bitte
Das klingt spannend!
Basierend auf euren Anregungen hab ich nochmal gesucht und bin jetzt bei dem hängen geblieben: 24V, 250Watt, ~300upm, 70€ => eBike/Scooter Motor
https://www.ebay.de/itm/MY1016Z-250W-24 ... 2680772297
Was haltet Ihr davon? Geplant sind insgesamt 2 Stück.
Akkupacks: Aktuell denk ich drüber nach einen 6S LIPO mit 10000mAh einzubauen. Die sind schön klein und leicht. Meinungen/Erfahrungen?
Gruß
danke für die vielen Antworten
@MichelH
Gibts das Angebot von den 20€ Hoverboards noch?
Das wären dann halt Brushlessmotoren, interessanter
@ferdimh
Danke für deine Einschätzung. Damit kann ich mal echt was anfangen.
Basierend auf deiner Erklärung hab ich auch mal ein bisschen mit den Zahlen gespielt und bin zu dem Ergebnis gekommen dass die Getriebemotoren nicht so das geeignete sind.
@sysconsol
Danke für deine Erfahrungsbericht zu den Scheibenwischermotoren, die sind damit wohl gestorben.
@Heaterman
Bilder bitte
Das klingt spannend!
Basierend auf euren Anregungen hab ich nochmal gesucht und bin jetzt bei dem hängen geblieben: 24V, 250Watt, ~300upm, 70€ => eBike/Scooter Motor
https://www.ebay.de/itm/MY1016Z-250W-24 ... 2680772297
Was haltet Ihr davon? Geplant sind insgesamt 2 Stück.
Akkupacks: Aktuell denk ich drüber nach einen 6S LIPO mit 10000mAh einzubauen. Die sind schön klein und leicht. Meinungen/Erfahrungen?
Gruß
-
Geistesblitz
- Beiträge: 1934
- Registriert: Di 5. Nov 2013, 17:53
- Wohnort: Dresden
Re: 4x4 Roboterplattform
Im "Wer wills haben?"-Forum im Kleinanzeigenbereich hier gabs Themen zu den Hoverboards, sieht allerdings nicht so aus, als würde sich derzeit um eine Sammelbestellung kümmern. Gibt halt welche, die große Posten an Rückläufern haben und die billig veräußern, allerdings nur ab 10 Stück Abnahmemenge und zum selber abholen.
Die Hoverboards arbeiten mit 36V, mit 24V sollten die auch umgehen können, allerdings sind die dann langsamer und schwächer. Für Spannungen über 6S findet man auch kaum noch ESCs, also die Motortreibermodule für RC-Modelle. Dafür gibt es dafür Module für E-Bikes, die allerdings anders angesteuert werden.
Die Motoren, die du da zeigst, find ich im Vergleich ein wenig teuer. Da könnte man sich gleich einen ganzen Schwung 10€-Hoverboards für weniger Geld holen und die Reste hier im Forum verteilen. Da sollten definitiv genug lauffähige Motoren bei sein, die gehen eher nicht so schnell kaputt wie die Steuerung oder der Akku.
Die Hoverboards arbeiten mit 36V, mit 24V sollten die auch umgehen können, allerdings sind die dann langsamer und schwächer. Für Spannungen über 6S findet man auch kaum noch ESCs, also die Motortreibermodule für RC-Modelle. Dafür gibt es dafür Module für E-Bikes, die allerdings anders angesteuert werden.
Die Motoren, die du da zeigst, find ich im Vergleich ein wenig teuer. Da könnte man sich gleich einen ganzen Schwung 10€-Hoverboards für weniger Geld holen und die Reste hier im Forum verteilen. Da sollten definitiv genug lauffähige Motoren bei sein, die gehen eher nicht so schnell kaputt wie die Steuerung oder der Akku.

 ->zoom
->zoom ->zoom
->zoomRe: 4x4 Roboterplattform
Hallo!
Ich habe in der Schulzeit mal etwas ähnliches gebaut:
https://sites.google.com/site/philipdoering/goliath
Bitte entschuldigt die Dokumentation, das ist jetzt gut 10 Jahre her
Das hat mit den Akkuschraubermotoren schon ganz gut funktioniert, allerdings sind diese nicht Drehmomentenfest, insbesondere beim Richtungswechsel sind die Zahnräder gerne mal gebrochen. Bei diesen Billigmotoren fungiert die Drehmomentbegrenzung der Motoren oftmals über den Akku. Wir hatten damals dann einen dicken Bleiakku als ersatz für die NiCd Akkus aus den Akkuschraubern dran, der hat entweder den Fahrtenregler, die Motoren oder das Getriebe gegrillt. Die einzigen Male, wo das gut funktioniert hat, war auf Eis. Da konnten die Räder einfach durchdrehen, und nichts ist kaputt gegangen.
Inzwischen mache ich in der Freizeit ein bisschen größere Projekte:
http://b13e.akaflieg-berlin.de/medien/
Ich habe in der Schulzeit mal etwas ähnliches gebaut:
https://sites.google.com/site/philipdoering/goliath
Bitte entschuldigt die Dokumentation, das ist jetzt gut 10 Jahre her
Das hat mit den Akkuschraubermotoren schon ganz gut funktioniert, allerdings sind diese nicht Drehmomentenfest, insbesondere beim Richtungswechsel sind die Zahnräder gerne mal gebrochen. Bei diesen Billigmotoren fungiert die Drehmomentbegrenzung der Motoren oftmals über den Akku. Wir hatten damals dann einen dicken Bleiakku als ersatz für die NiCd Akkus aus den Akkuschraubern dran, der hat entweder den Fahrtenregler, die Motoren oder das Getriebe gegrillt. Die einzigen Male, wo das gut funktioniert hat, war auf Eis. Da konnten die Räder einfach durchdrehen, und nichts ist kaputt gegangen.
Inzwischen mache ich in der Freizeit ein bisschen größere Projekte:
http://b13e.akaflieg-berlin.de/medien/
Re: 4x4 Roboterplattform
Die müssen den Strom abkönnen, ohne überlastet zu werden.Akkupacks:[...] Meinungen/Erfahrungen?
Welche Kapazität du dann brauchst - gute Frage.
Rechnet der Modellbauer da mit dem mittleren Strombedarf?
-
Heaterman
- Beiträge: 3990
- Registriert: Fr 28. Jun 2013, 10:11
- Wohnort: Am Rand der Scheibe, 6 m unter NN
Re: 4x4 Roboterplattform
Aach, gerade erst wieder gesehen, hab das Ding noch mal zerlegt und ein paar Bilder meines rudimentären Metallbearbeitungskönnens gemacht:
Das Ganze kommt jetzt auf einen Stahlträgerrahmen, der direkt an das Druckgusschassis geschraubt wird. Wenn ich soweit bin (bisher war das alles nur zum Testen provisorisch mit Spannbändern zusammengetackert), gibts weitere Fotos.
Gesteuert wird das derzeit noch mit einer Totmanntaste (ersetzt die Lichtschranken) und den Sensorboards in beiden Händen, hat natürlich noch Null WAF. Die Sensorboards fliegen raus und das Ganze soll mit einer Einhand-Modellfernsteuerung rennen, die empfangsseitig I2C ausgibt. Als Steuerung in die Hand gibts dann nur das https://www.funduinoshop.com/epages/780 ... cts/03-140 und eine Totmann-Taste.
Noch ein Hinweis zum Schubkarrenrad. Wenn man so ein Ding nimmt wie ich (Kunststofffelge), dann leuchte man vor dem Bohren die Felge von der anderen Seite an. Die Verstärkungsrippen sind nämlich nicht deckungsgleich auf beiden Seiten, sondern (auch noch unsymmetrisch) versetzt, um die Felge stabiler zu machen. Meine erste Bohrung ist nämlich genau auf der anderen Seite in so einer Rippe gelandet... Deshalb sind die Bohrungen auch nicht genau in 120 Grad ums Rad verteilt. Man braucht ja Platz für Muttern und U-Scheiben.
Und deshalb hab ich auch die Kraftverteilung über die Bolzen nach möglichst weit außen gelegt, damit die näher Richtung Außenrand liegt und mehr Felgenmaterial rings um die Bohrungen bleibt, das bei Querbelastung durch die Last auch besser arbeiten kann. Wenn man die Bohrungen zu weit innen Richtung Achse macht, kann der Kunststoff bei Querbelastung auf den kurzen Strecken zwischen den Bohrungen schon mal nachgeben und dann hat man vielleicht Risse.
Btw: Ich suche noch einen Stator oder ein ganzes Rad mit intaktem Kabelbaum. Zustand der Hallsensoren wäre egal, davon hab ich genug.
Bei einem meiner Räder haben Adern (Signalausgänge) zu zwei Hallsensoren Masseschluss innerhalb der Achse. Und den Kabelbaum da austauschen ist Strafarbeit.
- Die äußere Aluabdeckung ist sehr robust, da reichen vier Bolzen
- 3-mm-Aluscheibe ausgeschnitten, dass die am Ende genau in den Felgenring des Schubkarrenrades passt und die Kraft auch dann direkt auf den Felgenrand weitergibt
- Die montierte Aluscheibe
- Die angespaxte Schubkarrenfelge
- Im Hoverboard-Rad ist hinter dem Stator genug Platz für einen Schraubenkopf
- Theoretisch könnte man sogar das Originalgehäuse dranlassen, die Bolzen sind weit genug weg
- Bodenfreiheit des Konstrukts
Gesteuert wird das derzeit noch mit einer Totmanntaste (ersetzt die Lichtschranken) und den Sensorboards in beiden Händen, hat natürlich noch Null WAF. Die Sensorboards fliegen raus und das Ganze soll mit einer Einhand-Modellfernsteuerung rennen, die empfangsseitig I2C ausgibt. Als Steuerung in die Hand gibts dann nur das https://www.funduinoshop.com/epages/780 ... cts/03-140 und eine Totmann-Taste.
Noch ein Hinweis zum Schubkarrenrad. Wenn man so ein Ding nimmt wie ich (Kunststofffelge), dann leuchte man vor dem Bohren die Felge von der anderen Seite an. Die Verstärkungsrippen sind nämlich nicht deckungsgleich auf beiden Seiten, sondern (auch noch unsymmetrisch) versetzt, um die Felge stabiler zu machen. Meine erste Bohrung ist nämlich genau auf der anderen Seite in so einer Rippe gelandet... Deshalb sind die Bohrungen auch nicht genau in 120 Grad ums Rad verteilt. Man braucht ja Platz für Muttern und U-Scheiben.
Und deshalb hab ich auch die Kraftverteilung über die Bolzen nach möglichst weit außen gelegt, damit die näher Richtung Außenrand liegt und mehr Felgenmaterial rings um die Bohrungen bleibt, das bei Querbelastung durch die Last auch besser arbeiten kann. Wenn man die Bohrungen zu weit innen Richtung Achse macht, kann der Kunststoff bei Querbelastung auf den kurzen Strecken zwischen den Bohrungen schon mal nachgeben und dann hat man vielleicht Risse.
Btw: Ich suche noch einen Stator oder ein ganzes Rad mit intaktem Kabelbaum. Zustand der Hallsensoren wäre egal, davon hab ich genug.
Bei einem meiner Räder haben Adern (Signalausgänge) zu zwei Hallsensoren Masseschluss innerhalb der Achse. Und den Kabelbaum da austauschen ist Strafarbeit.
Re: 4x4 Roboterplattform
Wenn das eine Art handgeführter Elektrokarren (E-Schubkarre) wird, wieso dann so einen Spielzeughebelchen zur Steuerung?
Ich hätte da als erstes an kurze Fahrradbremshebel (1-Finger-Bedienung) oder Daumengas gedacht.
Zur Lenkunterstützung auch ein Hebel pro Hand und die Seiten getrennt ansteuern.
Dann aber eine Logik implementieren, die die Geschwindigkeit begrenzt, wenn man nur auf einer Seite zupackt
Ich hätte da als erstes an kurze Fahrradbremshebel (1-Finger-Bedienung) oder Daumengas gedacht.
Zur Lenkunterstützung auch ein Hebel pro Hand und die Seiten getrennt ansteuern.
Dann aber eine Logik implementieren, die die Geschwindigkeit begrenzt, wenn man nur auf einer Seite zupackt
-
Heaterman
- Beiträge: 3990
- Registriert: Fr 28. Jun 2013, 10:11
- Wohnort: Am Rand der Scheibe, 6 m unter NN
Re: 4x4 Roboterplattform
Nicht handgeführt: ferngesteuert. Die Bedienerin hat 2 m Abstand zu halten, das hat Gründe. 
Re: 4x4 Roboterplattform
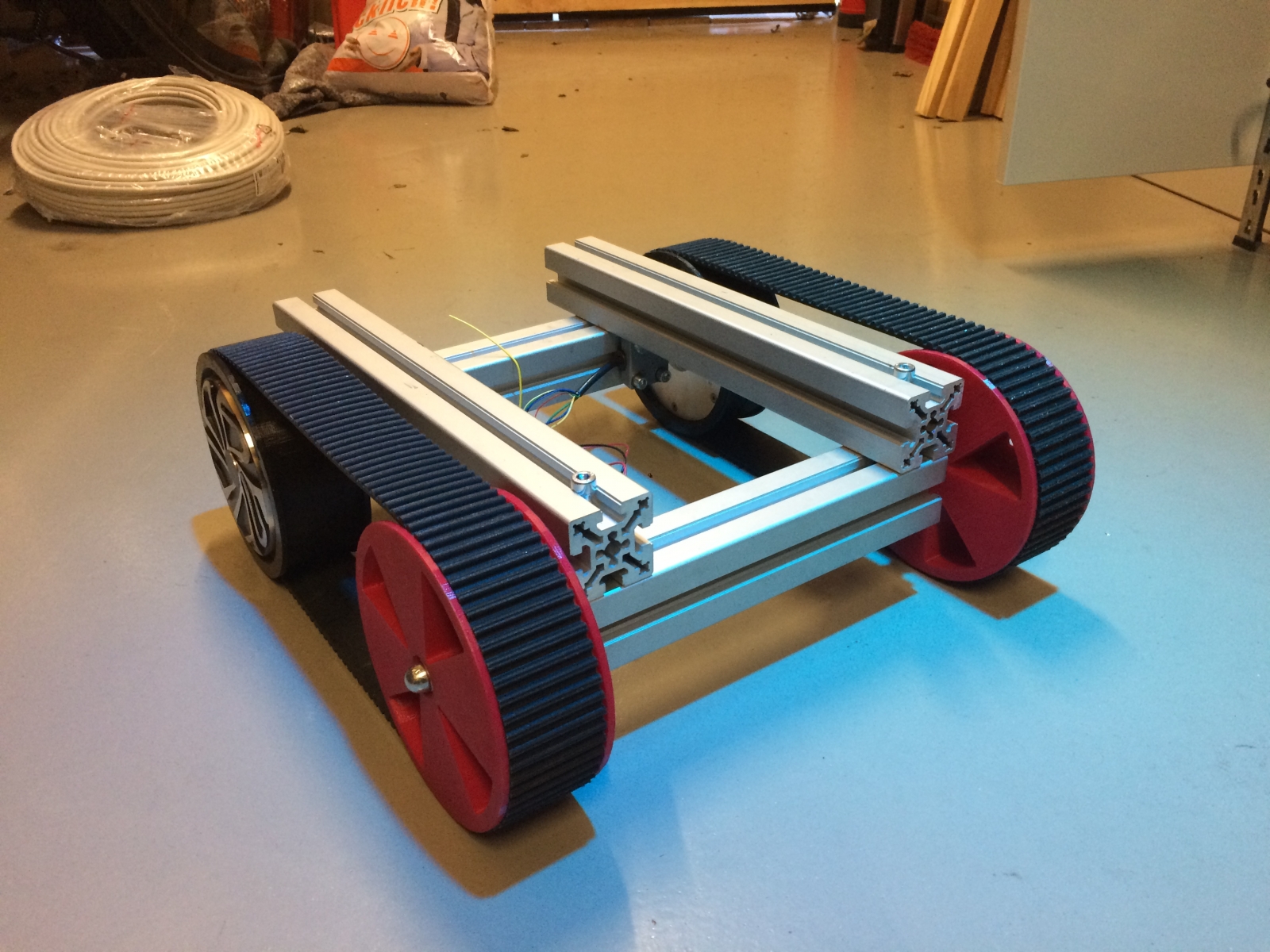
Ich hab jetzt endlich mal mein "Kettenfahrwerk" zusammengeworfen.
Die "Kette" ist ein fetter Zahnriemen aus einer CNC Fräse (pama speedram). Die beiden laufräder sind 3D gedruckt bestehend aus zwei hälften. in der mitte stecken Kugellager und das ganze sitzt auf einer M10 gewindestange die mittig durch das Aluprofil geht.
Die Hoverboardmotoren hab ich aufgeschraubt und dann den Vollgummimantel abgezogen (ging ziemlich easy). Auf dem nacktem Motor steckt dann wieder eine 3D gedruckte Felge.
Die Motoren liegen mit ihrer Achse einfach in der Nut vom Profil und der originale Halter ist mit vier M8 schrauben in das Profil geschraubt.
Hab bis jetzt mit dem Chinatreiber etwas probleme das der nicht anfahren will sondern nur brummt. Nach nem kleinem schubs schnurrt der los. Mal schauen was man da noch ändern kann
 ->zoom
->zoom
 ->zoom
->zoom
 ->zoom
->zoom
 ->zoom
->zoom
Die "Kette" ist ein fetter Zahnriemen aus einer CNC Fräse (pama speedram). Die beiden laufräder sind 3D gedruckt bestehend aus zwei hälften. in der mitte stecken Kugellager und das ganze sitzt auf einer M10 gewindestange die mittig durch das Aluprofil geht.
Die Hoverboardmotoren hab ich aufgeschraubt und dann den Vollgummimantel abgezogen (ging ziemlich easy). Auf dem nacktem Motor steckt dann wieder eine 3D gedruckte Felge.
Die Motoren liegen mit ihrer Achse einfach in der Nut vom Profil und der originale Halter ist mit vier M8 schrauben in das Profil geschraubt.
Hab bis jetzt mit dem Chinatreiber etwas probleme das der nicht anfahren will sondern nur brummt. Nach nem kleinem schubs schnurrt der los. Mal schauen was man da noch ändern kann
 ->zoom
->zoom ->zoom
->zoom ->zoom
->zoom ->zoom
->zoom-
Geistesblitz
- Beiträge: 1934
- Registriert: Di 5. Nov 2013, 17:53
- Wohnort: Dresden
Re: 4x4 Roboterplattform
Du hast da jetzt aber hoffentlich nicht zwei Motoren an einem Treiber hängen, oder? Sieht irgendwie im letzten Bild so aus.
Re: 4x4 Roboterplattform
nope. natürlich nicht Der zweite treiber steckt noch in der Post fest. Bis jetzt ist nur ein Motor angetrieben
-
Geistesblitz
- Beiträge: 1934
- Registriert: Di 5. Nov 2013, 17:53
- Wohnort: Dresden
Re: 4x4 Roboterplattform
Kühlkörper ist auch nicht dran, also das Problem mit den kurzgeschlossenen Transen, das ich hatte, kanns nicht sein. Hallsensoren sind verbunden?
Ich bastel jedenfalls auch gerade an einer Testplattform, hab gerade ne Ladung Laptopakkus von Ebay bekommen. Wenn ich damit weiter bin berichte ich auch mal
Ich bastel jedenfalls auch gerade an einer Testplattform, hab gerade ne Ladung Laptopakkus von Ebay bekommen. Wenn ich damit weiter bin berichte ich auch mal
Re: 4x4 Roboterplattform
Kühlkörper braucht man bei kurzen Tests nicht wirklich. Hier liegen aber schon passende Kühlkörper dafür rum. Hallsensoren sind (richtig) angeschlossen.Geistesblitz hat geschrieben:Kühlkörper ist auch nicht dran, also das Problem mit den kurzgeschlossenen Transen, das ich hatte, kanns nicht sein. Hallsensoren sind verbunden?
-
Bastelbruder

- Beiträge: 11566
- Registriert: Mi 14. Aug 2013, 18:28
Re: 4x4 Roboterplattform
Da fehlt offensichtlich das Drehfeld, also eine Phase. Und dann läßt der Motor sich vielleicht sogar in beide Richtungen anwerfen, in die Falsche gehts etwas schwerer.Hab bis jetzt mit dem Chinatreiber etwas probleme das der nicht anfahren will sondern nur brummt. Nach nem kleinem schubs schnurrt der los. Mal schauen was man da noch ändern kann
-
Geistesblitz
- Beiträge: 1934
- Registriert: Di 5. Nov 2013, 17:53
- Wohnort: Dresden
Re: 4x4 Roboterplattform
Dreht sich das Rad denn auch im unbelasteten Zustand, also in die Luft gehalten und ohne RIemen? Nicht, dass da wirklich was faul ist. Lässt sich der Motor frei von Hand drehen? Ich hatte einen, da war die Isolierung kacke und mindestens zwei Wicklungen waren über das Aluteil kurzgeschlossen.
Re: 4x4 Roboterplattform
Hallo Zusammen,
aus 4x4 würde 6x6. Die Kiste fährt und macht ganz schön Spaß. Bilder folgen.
Also Akku hab ich eine LiPo 6S mit 4500mAh eingesetzt. Leider hat eine der Zellen vermutlich aufgrund unsachgemäßer Behandlungen jetzt volle 0V und damit dürfte der Akku Schrott sein.
Jetzt wollte ich Mal eure Meinung bzgl. Akkus hören...
Ich brauche 24v, 5-20Ah, ISDT Q6 Lader vorhanden, Schnellladefähigkeit 1h, 0-35°C Einsatzbereich
LiPo 6s, 4500mAh, 50€
Klein, leicht, günstig, mögen keine Tiefentladung, leicht 700g, schnell defekt bei unsachgemäßer Behandlungen
Headway 10000mAh 38140 6s, 2kg, 150€
Robust, sicher, Zyklenfest, niedrige Temperaturen problemlos möglich
Was gibt's noch?
Gruß nux.
aus 4x4 würde 6x6. Die Kiste fährt und macht ganz schön Spaß. Bilder folgen.
Also Akku hab ich eine LiPo 6S mit 4500mAh eingesetzt. Leider hat eine der Zellen vermutlich aufgrund unsachgemäßer Behandlungen jetzt volle 0V und damit dürfte der Akku Schrott sein.
Jetzt wollte ich Mal eure Meinung bzgl. Akkus hören...
Ich brauche 24v, 5-20Ah, ISDT Q6 Lader vorhanden, Schnellladefähigkeit 1h, 0-35°C Einsatzbereich
LiPo 6s, 4500mAh, 50€
Klein, leicht, günstig, mögen keine Tiefentladung, leicht 700g, schnell defekt bei unsachgemäßer Behandlungen
Headway 10000mAh 38140 6s, 2kg, 150€
Robust, sicher, Zyklenfest, niedrige Temperaturen problemlos möglich
Was gibt's noch?
Gruß nux.
-
berlinerbaer
- Beiträge: 1063
- Registriert: Di 22. Aug 2017, 05:19
- Wohnort: Berlin
Re: 4x4 Roboterplattform
Da Platz und Gewicht nicht so die Rolle spielen, würde ich mal schauen wieviel Ampère das Ding bei Vollast zieht und dann entsprechend viele Stränge paralell aus alten laptop-Akkus zusammenschweißen, wie Du brauchst.
Wenn da mal eine schlapmacht, wechselst Du sie einfach aus. Typischerweise habe solche Zellen so zwischen 1,5 und gut 2 Ah Kapazität übrig, wenn sie in der grünen Kiste landen.
Wenn da mal eine schlapmacht, wechselst Du sie einfach aus. Typischerweise habe solche Zellen so zwischen 1,5 und gut 2 Ah Kapazität übrig, wenn sie in der grünen Kiste landen.
Re: 4x4 Roboterplattform
Nach langer Zeit gibts hier mal wieder ein Update. Angefangen hat alles mit einem Konzept aus dem Lego-Baukasten (gefedert, ungefedert, Knicklenker, ...). Gewonnen hat der starre 6x6 Rahmen.
Danach wurd' mal die erste Variante aus 40x80 Aluprofil, Lagerböcken sowie 20mm Wellen und Ritzel zusammengebaut. Das Monster hat sich dann tatsächlich auch schon bewegt und war bereit für die erste Ausfahrt.
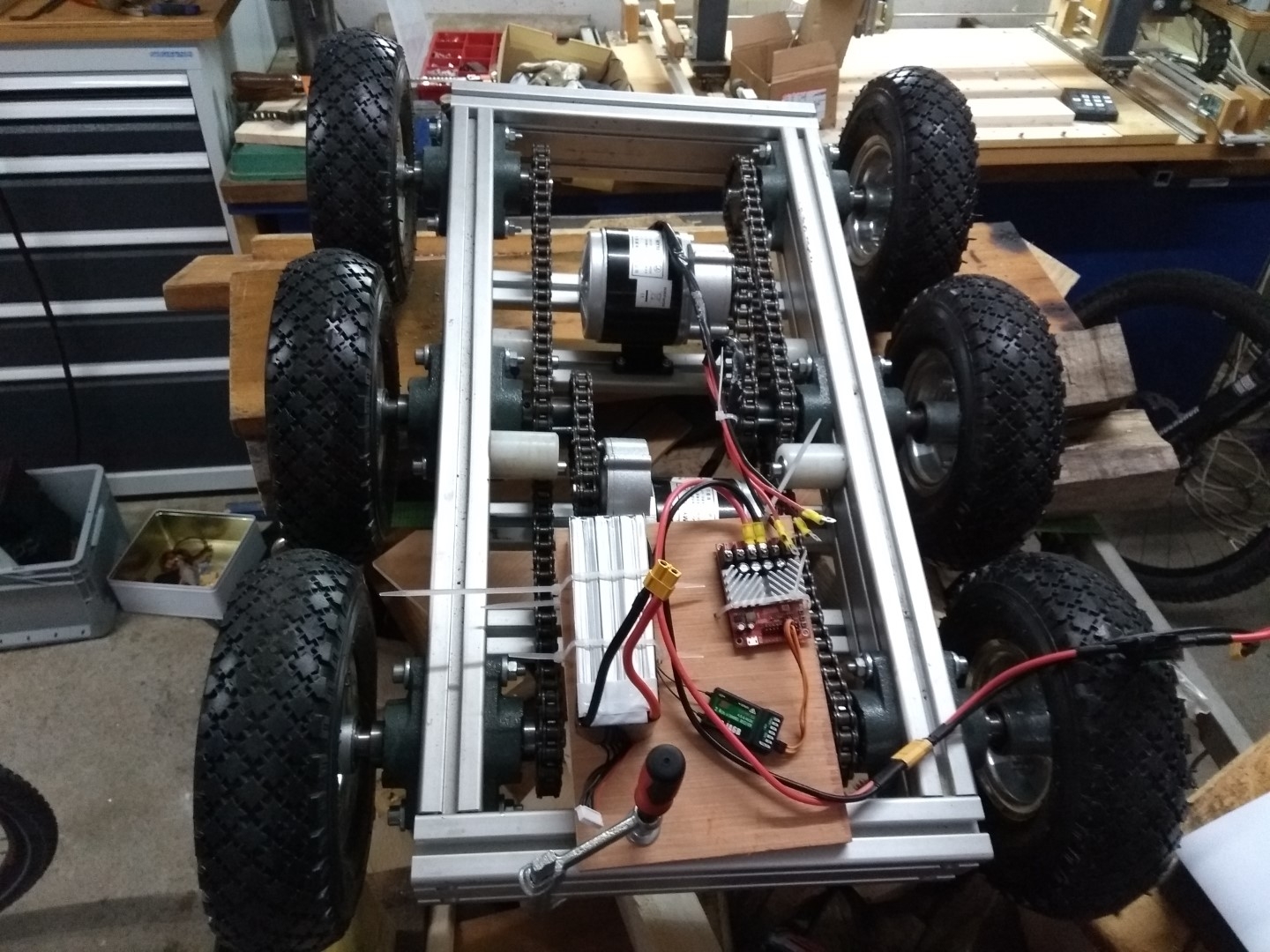
Bei jeder Fahrt hat dann was anderes aufgrund des Drehmoments aufgegeben und die Mechanik wurde iterativ optimiert. Nachdem der LiPo dann wegen unsachgemäßer Behandlung einen Zellschluss hatte, wurde der Akku umgestellt auf LiFePo4 (2*4Zellen).
Letztes Jahr wurden dann noch zwei Linearmotoren ergänzt und fertig ist der Gabelstapler.


Gruß nux
Danach wurd' mal die erste Variante aus 40x80 Aluprofil, Lagerböcken sowie 20mm Wellen und Ritzel zusammengebaut. Das Monster hat sich dann tatsächlich auch schon bewegt und war bereit für die erste Ausfahrt.
Bei jeder Fahrt hat dann was anderes aufgrund des Drehmoments aufgegeben und die Mechanik wurde iterativ optimiert. Nachdem der LiPo dann wegen unsachgemäßer Behandlung einen Zellschluss hatte, wurde der Akku umgestellt auf LiFePo4 (2*4Zellen).
Letztes Jahr wurden dann noch zwei Linearmotoren ergänzt und fertig ist der Gabelstapler.
Gruß nux
Re: 4x4 Roboterplattform
Waaahhh. Und ich habe mir extra eine Trecker gekauft. Kann der Europalette? Und 600 kg Heuballen?
Sehr schönes Gerät, tolle Arbeit.
Gruß
Kuddel
Sehr schönes Gerät, tolle Arbeit.
Gruß
Kuddel
Re: 4x4 Roboterplattform
Jetzt stelle ich mir gerade vor, wie Kuddel den Trecker an der Longe führt.
Heben und Senken via Schnalzlaut.

Heben und Senken via Schnalzlaut.
Re: 4x4 Roboterplattform
Vermutlich geht der mit seinen zarten 45kg Eigengewicht und ~60kg Hubkraft eher als Sidekick vom Trekker durch
Re: 4x4 Roboterplattform
Coole Idee. Einen Folllow Trecker Roboter.
Kurz FTR
Kurz FTR
Re: 4x4 Roboterplattform
Richtig cooles Teil 
Bin schon lange am Überlegen, mir ein ähnliches Gefährt zum Anhänger rangieren zu bauen. Was mir aber wirklich Sorgen macht, ist die Bremskraft. Das Gefährt müsste schon ziemlich schwer sein, um einen Anhänger mit sagen wir mal 2T davon abzuhalten eine leichte Neigung hinunter zu rollen. Was denkt ihr?
Bin schon lange am Überlegen, mir ein ähnliches Gefährt zum Anhänger rangieren zu bauen. Was mir aber wirklich Sorgen macht, ist die Bremskraft. Das Gefährt müsste schon ziemlich schwer sein, um einen Anhänger mit sagen wir mal 2T davon abzuhalten eine leichte Neigung hinunter zu rollen. Was denkt ihr?

Re: 4x4 Roboterplattform
such mal nach "Mover" für Wohnwagen, das sind anklappbare E-Antriebe die direkt auf die
Räder des Anhängers wirken... sollte zielführender sein für Deinen Anwendungszweck.
Räder des Anhängers wirken... sollte zielführender sein für Deinen Anwendungszweck.
Re: 4x4 Roboterplattform
Die kenne ich, sind aber nicht besonders variabel. Ich stelle mir etwas vor, das einen Kugelkopf hat und innerhalb von 10s an jeden Anhänger adaptiert werden kann.
Re: 4x4 Roboterplattform
schnelle Ali hat etwas
https://de.aliexpress.com/item/32270645686.html
Andere Lösung: Stützrad durch dieser Ding ersetzen.
https://de.aliexpress.com/item/32877195416.html
https://de.aliexpress.com/item/32270645686.html
Andere Lösung: Stützrad durch dieser Ding ersetzen.
https://de.aliexpress.com/item/32877195416.html