
Ups ich vergass....
[url]http://instructables.com/id/DIY-45-FPV- ... Planes[url]
Quadrocopter Diskussionssthread
Moderatoren: Heaterman, Finger, Sven, TDI, Marsupilami72, duese
Re: Quadrocopter Diskussionssthread
Ich habe es mal gewagt:

vorsichtshalber mal an ein Schütz angebunden, wer weis.....
Abgesehen, dass er etwas taumelt(wird daran liegen, dass er in seiner durchgequirlten Luft fliegen muss) geht das schon ziemlich gut.

vorsichtshalber mal an ein Schütz angebunden, wer weis.....
Abgesehen, dass er etwas taumelt(wird daran liegen, dass er in seiner durchgequirlten Luft fliegen muss) geht das schon ziemlich gut.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Dann Failsafe justieren, dann testen und ab dafür 

Re: Quadrocopter Diskussionssthread
So, nach längerer Zwangspause geht es weiter:
Die Benachrichtigung vom Zoll ist da, ich werd gleich
morgen früh hinschüsseln, und das Paket abholen.
Ozon, du hast mal gesagt, du hättest so ne CE Erklärung
für die Funkmodule. Wäre es möglich das zu mailen?
Damit es Montag dann auch direkt weitergehen kann,
steht die Mechanik bereits.

Ja - der is komplett aus Alu, etwas stabiler geworden, und bereit nach der Testphase
auch stärkere Motoren, evtl. Kamera aufnehmen zu können
LG,
Dirk
Die Benachrichtigung vom Zoll ist da, ich werd gleich
morgen früh hinschüsseln, und das Paket abholen.
Ozon, du hast mal gesagt, du hättest so ne CE Erklärung
für die Funkmodule. Wäre es möglich das zu mailen?
Damit es Montag dann auch direkt weitergehen kann,
steht die Mechanik bereits.
Ja - der is komplett aus Alu, etwas stabiler geworden, und bereit nach der Testphase
auch stärkere Motoren, evtl. Kamera aufnehmen zu können
LG,
Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Bischen schwer das Ganze, und dickere Motoren+10mm Alu Vierkant = zu wabbelig. Ich bohr grad 15er auf

Kleiner FC für nen Handflächengroßen Wohnzimmerbolzcopter Fehlt noch IMU (MPU6050 Breakout) und Empfänger, ESCs sind schon drauf  Teile sollten spätestens diese Woche da sein
Teile sollten spätestens diese Woche da sein

Kleiner FC für nen Handflächengroßen Wohnzimmerbolzcopter
Re: Quadrocopter Diskussionssthread
Oh wie Süß!
Das mit dem Failsave klappt so halb:
Den richtigen Gaswert habe ich eingestellt und der Copter schaltet sich auch nach der eingestellten Zeit ab. Soweit ok.
Wenn das Siglal aber weg ist, fallen aus dem Empfänger weiterhin fröhlich die Daten raus!
Die letzten Stellungen werden weiterhin übertragen und es wird kein Failsave erkannt.
zum testen habe ich immer den Stecker vom Empfänger gezogen.
Laut Anleitung soll man bei abgeschaltetem Sender kurz die F/S Taste drücken.
irgendwie will das trotzdem nich
Achja: der Telemetriekam geht nun!
Es wahren tatsächlich RX & TX vertauscht.
Das Oszi hat das schnell entlarvt
Ich kann nun schonmal die Signalstärken sehen.
Die Akkuspannungen noch nicht, da muss ich noch den Spannungsteiler dranbaten.
wo müsste ich denn dann eigentlich die Spannung sehen können?
Das mit dem Failsave klappt so halb:
Den richtigen Gaswert habe ich eingestellt und der Copter schaltet sich auch nach der eingestellten Zeit ab. Soweit ok.
Wenn das Siglal aber weg ist, fallen aus dem Empfänger weiterhin fröhlich die Daten raus!
Die letzten Stellungen werden weiterhin übertragen und es wird kein Failsave erkannt.
zum testen habe ich immer den Stecker vom Empfänger gezogen.
Laut Anleitung soll man bei abgeschaltetem Sender kurz die F/S Taste drücken.
irgendwie will das trotzdem nich
Achja: der Telemetriekam geht nun!
Es wahren tatsächlich RX & TX vertauscht.
Das Oszi hat das schnell entlarvt
Ich kann nun schonmal die Signalstärken sehen.
Die Akkuspannungen noch nicht, da muss ich noch den Spannungsteiler dranbaten.
wo müsste ich denn dann eigentlich die Spannung sehen können?
-
Name vergessen
- Beiträge: 3261
- Registriert: Mo 12. Aug 2013, 19:47
Re: Quadrocopter Diskussionssthread
Wie niieedlich!ozonisator hat geschrieben:Kleiner FC für nen Handflächengroßen Wohnzimmerbolzcopter
Sag mal, wären diese boards brauchbar? Müßte vom Chip her ja passen.
Bei dem Gesamtwert braucht man wohl kaum mit Zollproblemen zu rechnen, aber was ist mit dem China Export - Qualitätssiegel?
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
@xanakind:
Dran denken, Failsafe bei knallvollem Akku justieren!!
Habs doch gesagt... Die Spannung siehst du dann im Telemetriemenü. Da wo du unten RX und TX RSSI siehst (Steuerkreuz lange nach unten). Da steht dann für A2 min/max und aktueller Spannungswert. Musst du halt im FrSyk Modell-Untermenü konfigurieren ab wann die Funke piepen soll. Und halt was du für ein Teilerverhältnis hast.
@ Name vergessen:
ja, so ein Board meinte ich. CE ist wurst. Wird ja eh nich aufgemacht...
http://www.hobbyking.com/hobbyking/stor ... _4pc_.html
http://www.hobbyking.com/hobbyking/stor ... _8pc_.html
Ich hab geschlagene 2 Stunden rumgedoktort bis das ging! Versuch mal folgendes. Neu binden, dann Empfänger und Funke abschalten. Dann Empfänger an, und Funke aus lassen, dann FS Knopf einmal feste drücken. Bei mir blinkte nix... Neue Firmware anscheinend (hab nochn Empfänger gekauft für auf Halde, der Alte ging so nach Anleitung wunderbar). Musst ggf nen Stift nehmen um fest genug zu drücken. Dann Empfänger aus, Funke an, Empfänger an, und mitm Oszi gucken. Du musst vorher neu binden, damit die alte Config überschrieben wird. Sehr ominös das Ganze, bei mir hats dann aber so gefluppt.Laut Anleitung soll man bei abgeschaltetem Sender kurz die F/S Taste drücken.
irgendwie will das trotzdem nich
Dran denken, Failsafe bei knallvollem Akku justieren!!
Achja: der Telemetriekam geht nun!
Es wahren tatsächlich RX & TX vertauscht.
Das Oszi hat das schnell entlarvt
Ich kann nun schonmal die Signalstärken sehen.
Die Akkuspannungen noch nicht, da muss ich noch den Spannungsteiler dranbaten.
wo müsste ich denn dann eigentlich die Spannung sehen können?
Habs doch gesagt...
@ Name vergessen:
ja, so ein Board meinte ich. CE ist wurst. Wird ja eh nich aufgemacht...
Hobbyking...Wie niieedlich!Wo kriegt man denn so winzige [M|R]otoren her? ^^
http://www.hobbyking.com/hobbyking/stor ... _4pc_.html
http://www.hobbyking.com/hobbyking/stor ... _8pc_.html
Re: Quadrocopter Diskussionssthread
*hehe* keine Sorge, der IST aus 15er Vierkant gebaut.ozonisator hat geschrieben:Bischen schwer das Ganze, und dickere Motoren+10mm Alu Vierkant = zu wabbelig. Ich bohr grad 15er auf
Und statt Platinen halt 0,5er Alubech, das wiegt auch nicht
soo viel mehr, is aber sehr stabil und zäh.
Einzig die Winkel als Landegestell gefallen mir noch
nicht so 100%ig. Aber zum rumprobieren tuts das allemal
LG,
Dirk
PS: Die kleinen Motörchen haben aber echt Dampf. Ich hab grad
nur einen Regler, kann also nur einen anschmeißen.
Aber der macht mit ner 10*4,5er latte richtig Dampf. (die richtigen props kommen morgen)
Und gönnt sich dabei max. 10,3A.
Der würde das Gestell bei Vollgas locker umschmeißen.
Re: Quadrocopter Diskussionssthread
Ich glaubs nich!
das geht tatsächlich!
Ich habe vorher schon zig mal neu angelernt und die Taste gedrückt.
Scheinbar muss man das genau in dieser Reihenfolge machen, komisch.....
Danke für den Tipp!
Ich habe mir noch das Accucell6 gekauft.
Das hab ich auf ein PC Netzteil geklebt und habe zum testen immer einen frisch geladenen Akku angeklemmt.
das geht tatsächlich!
Ich habe vorher schon zig mal neu angelernt und die Taste gedrückt.
Scheinbar muss man das genau in dieser Reihenfolge machen, komisch.....
Danke für den Tipp!
Ich habe mir noch das Accucell6 gekauft.
Das hab ich auf ein PC Netzteil geklebt und habe zum testen immer einen frisch geladenen Akku angeklemmt.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Ja ja, ich sags ja. Ich war auch kurz vorm anzünden....Ich glaubs nich!
das geht tatsächlich!
Ich habe vorher schon zig mal neu angelernt und die Taste gedrückt.
Scheinbar muss man das genau in dieser Reihenfolge machen, komisch.....
Danke für den Tipp!
Komm dann noch ins Tutorial.
Und Akkus immer brav auf "BAL" laden, mit Balancer Stecker undso.
Re: Quadrocopter Diskussionssthread
Mal ne ganz doofe Frage:
Wie kann man die PID Werte verändern?!
Ich habe das Gefühl, dass meiner momentan viel zu viel nachregelt.
Wenn ich ihn festhalte, eiert der wild hin und her
Ausserdem dreht er sich momentan gegen den Urzeigersinn......
Vor dem Programmieren des Failsave war das nicht so (?)
komisch.....
Wie kann man die PID Werte verändern?!
Ich habe das Gefühl, dass meiner momentan viel zu viel nachregelt.
Wenn ich ihn festhalte, eiert der wild hin und her
Ausserdem dreht er sich momentan gegen den Urzeigersinn......
Vor dem Programmieren des Failsave war das nicht so (?)
komisch.....
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
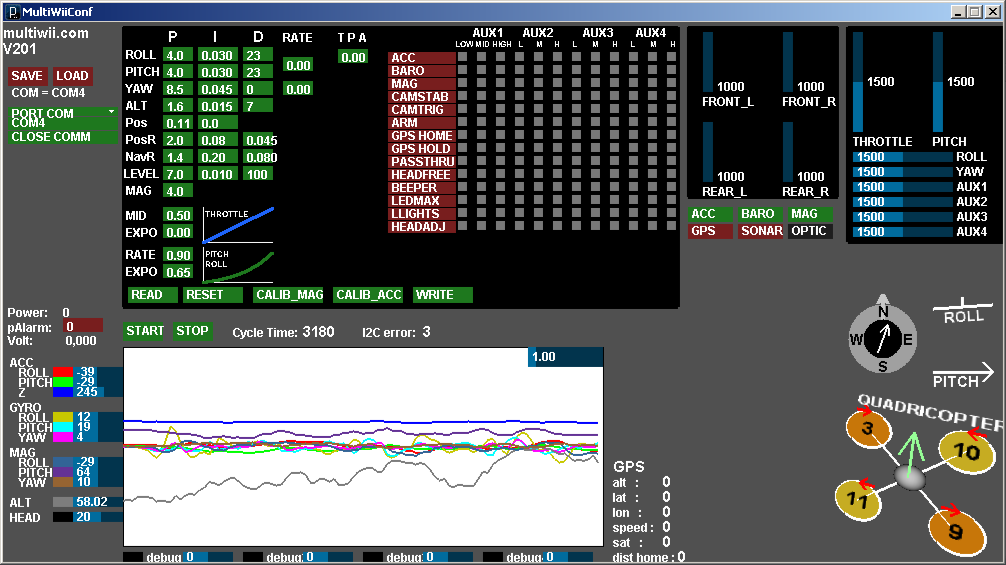
http://www.multiwii.com/wiki/images/0/0 ... iiConf.png
Klick mal auf den Button CALIB_ACC (neben write), das musst du neu machen wenn du den Failsafe aufspielst ! Bekommt ja ne komplett neue Software, da ist der EEprom wieder leer und somit die Kalibrierungsdaten WEG.
Mit den default PID Werten _MUSS_ er schwingungsfrei in der Luft stehen. Flight Controller mit Schaumstoffklebeband etwas entkoppelt ?
Werte ändern geht mittes Maustaste gedrückt halten und nach rechts/links ziehen. Aber da musst du nix ändern.
Klick mal auf den Button CALIB_ACC (neben write), das musst du neu machen wenn du den Failsafe aufspielst ! Bekommt ja ne komplett neue Software, da ist der EEprom wieder leer und somit die Kalibrierungsdaten WEG.
Mit den default PID Werten _MUSS_ er schwingungsfrei in der Luft stehen. Flight Controller mit Schaumstoffklebeband etwas entkoppelt ?
Werte ändern geht mittes Maustaste gedrückt halten und nach rechts/links ziehen. Aber da musst du nix ändern.
Re: Quadrocopter Diskussionssthread
Die Sensoren habe ich nach dem einrichten des Failsave neu kalibriert und die Standardwerte geladen.
Das MultiWii Board habe ich mit 3M Dual Lock befestigt, da ich solches Schaumstoffklebeband gerade nicht da hatte. Das dämpft aber so gut wie garnicht......
Morgen werde ich das gleich mal ändern, ich werde berichten, Danke für den Hinweis!
Das MultiWii Board habe ich mit 3M Dual Lock befestigt, da ich solches Schaumstoffklebeband gerade nicht da hatte. Das dämpft aber so gut wie garnicht......
Morgen werde ich das gleich mal ändern, ich werde berichten, Danke für den Hinweis!
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Halte den Copter nicht zu sehr fest. Lass ihn mal in seine "natürliche Nullage" kommen. Hast du denn mal richtige Flugversuche unternommen ? Richtung kleine Hüpfer undso
Re: Quadrocopter Diskussionssthread
SO, es ist geschehen. Er hat seinen ersten "Hüpfer" vollführt.
Es gibt ein paar Sachen, die ich nicht begreife.
BSPW. sind die Lichter am Sender und Empfänger anders als
erwartet. Aber es funzt, auch die Telemetrie ist da (RX/TX, Teiler ist noch nicht drin)
Alles weitere morgen, für heut bin ich groggy!
LG,
Dirk
Es gibt ein paar Sachen, die ich nicht begreife.
BSPW. sind die Lichter am Sender und Empfänger anders als
erwartet. Aber es funzt, auch die Telemetrie ist da (RX/TX, Teiler ist noch nicht drin)
Alles weitere morgen, für heut bin ich groggy!
LG,
Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Welche Lichter? Meinst du die Status-LEds ?BSPW. sind die Lichter am Sender und Empfänger anders als
erwarte
Re: Quadrocopter Diskussionssthread
Ja, genau. Der Rx zeigt nur eine schwache grüne Led, beim TX
leuchtet rot dauernd und grün blinkt schnell dazu. Im testmode
Blinkt grün am TX schnell.
Mach mal Bilder heut Abend...
Laut den Videos sollte am Rx die rote Led dauernd leuchten,
wenn die Verbindung steht. (BIND)
Naja, die Steuerung tut aber voll und ganz. Summensignal
Kommt an der Wii an, alle Kanäle sind da. Auch die Telemetrie
Funktioniert. Ich sehe rx und TX, den Spannungsteiler werde
Ich bauen, sobald ich Feierabend hab.
Ach ja, er fliegt, dreht sich dabei aber langsam um seine
Eigene Achse. Muss ich wohl nochmal kalibrieren.
LG,
Dirk
leuchtet rot dauernd und grün blinkt schnell dazu. Im testmode
Blinkt grün am TX schnell.
Mach mal Bilder heut Abend...
Laut den Videos sollte am Rx die rote Led dauernd leuchten,
wenn die Verbindung steht. (BIND)
Naja, die Steuerung tut aber voll und ganz. Summensignal
Kommt an der Wii an, alle Kanäle sind da. Auch die Telemetrie
Funktioniert. Ich sehe rx und TX, den Spannungsteiler werde
Ich bauen, sobald ich Feierabend hab.
Ach ja, er fliegt, dreht sich dabei aber langsam um seine
Eigene Achse. Muss ich wohl nochmal kalibrieren.
LG,
Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
RX im Normalbetrieb: grüne LED schwach an, TX Orange (rot grün flackert sehr schnell)
TX im Bindmodus: Rot/Grün blinkt wechselnd mit ca 2Hz.
TX Reichweitencheck: Grün blinkt.
RX Failsafe: Rot blinkt.
Das Meiste bezieht sich eh sowieso auf das Modul für den Einschub unten an der Funke, kann man getrost ignorieren.
Prüf auch du bitte nach, ob das Summensignal bei Verbindungsabriss (Funke ausmachen) weg ist.
btw:
Mein Copter hats hinter sich
Kopfüber mit 30 Sachen eingetaucht. Ein Motor schief und knarzend. Ein neuer Motor und die Kiste rennt wieder. Aber soweit kommts nicht, ROFLcopter 2.0 ist in der Mache
TX im Bindmodus: Rot/Grün blinkt wechselnd mit ca 2Hz.
TX Reichweitencheck: Grün blinkt.
RX Failsafe: Rot blinkt.
Schwachsinn....Laut den Videos sollte am Rx die rote Led dauernd leuchten,
wenn die Verbindung steht. (BIND)
Das Meiste bezieht sich eh sowieso auf das Modul für den Einschub unten an der Funke, kann man getrost ignorieren.
Prüf auch du bitte nach, ob das Summensignal bei Verbindungsabriss (Funke ausmachen) weg ist.
btw:
Mein Copter hats hinter sich
Kopfüber mit 30 Sachen eingetaucht. Ein Motor schief und knarzend. Ein neuer Motor und die Kiste rennt wieder. Aber soweit kommts nicht, ROFLcopter 2.0 ist in der Mache
Re: Quadrocopter Diskussionssthread
Schön, das zu lesen. Demnach ist also meine Fernsteuerung
soweit in Ordnung. Die Lichter verhalten sich exakt so,
wie Du es beschreibst.
Habe einen Reichweiten-Test gemacht. RX im bastelzimmer, erster Stock
an Batt und Motor (im Schraubstock fixiert, mit zu großer Latte),
Dirk mit TX ins Auto und dann die Telemetrie beobachtet.
TX immer schön aus dem Fenster gehalten. Die Nachbarn haben
sowas von blöde geschaut
Als "Lebenszeichen" immer mal den Motor auf Vollgas
gestartet, und die übertragene Spannung beobachtet.
Wenn die zuckt, passt die Kette
So hab ich in der Stadt etwa 375 bis 400m überbrücken können.
Je nach Lage. Manchmal waren es auch nur 200m.
Es waren Häuser dazwischen, und das Gelände steigt deutlich an.
Ich denke mal, das ist voll OK, da man sonst für die Freq. optische
Sicht braucht. Da kann ich mir dann die angegebenen 1,5 KM auch vorstellen!
So, aber ein Problem bleibt: mein Copter hebt ab, kann ihn links/rechts Vor/Zurück
steuern, ABER er dreht sich immer um sich selbst! Egal, was ich am YAW Hebel mach,
der reagiert genau wie links/rechts. Das Dingens dreht sich alle ~2 oder 3 Sekunden
einmal um sich selbst.
Ich habe den als X konfiguriert, nicht als Plus. Nur aus dem Grunde, daß mein
"kleiner" (Blade Nano QX) auch ein "X" ist.
Ich kann alle 4 Kanäle im Konfig-Programm sehen, und voll aussteuern.
(Balken gehen von null auf voll.)

Habe alle 4 Regler wider in den "Normalzustand" gebracht, sprich original
gebrannt und dann Factory Reset. keine Änderung.
Hatte die FlightControl erst nicht komplett mittig auf der Zentralplatte,
dann nen "Turm" gebaut, und den Acc Chip komplett in die Mitte.
neuer Abgleich - altes verhalten.
Ich krieg die "Drehung" einfach nicht weg *wähhhhhhh*
Sonst ist das Ding echt Sahne, steigt gut, und ist agil.
Aber "Ventilator" spielen sollte er halt nicht.
LG,
Dirk (ratlos)
Leider ist es zu dunkel, um draussen ein Vid zu machen,
musste vorher noch die PA aus dem Proberaum holen,
und im Wohnzimmer ist fliegen (aufzeichnen) aufgrund
der Drehung einfach nicht machbar...!
PS: Beileid zu Deinem Crash! Ich hoffe, das es bald wider
ab in die Lüfte geht
PS/2: Wenn Du Mots/Regler/RX nichtmehr verwenden willst
(neuer QC), ich würd die alten Teile kaufen
Wäre erstens Sicherheit für meinen "Igor1", und würde
die Wartezeit aus China verkürzen.
soweit in Ordnung. Die Lichter verhalten sich exakt so,
wie Du es beschreibst.
Habe einen Reichweiten-Test gemacht. RX im bastelzimmer, erster Stock
an Batt und Motor (im Schraubstock fixiert, mit zu großer Latte),
Dirk mit TX ins Auto und dann die Telemetrie beobachtet.
TX immer schön aus dem Fenster gehalten. Die Nachbarn haben
sowas von blöde geschaut
Als "Lebenszeichen" immer mal den Motor auf Vollgas
gestartet, und die übertragene Spannung beobachtet.
Wenn die zuckt, passt die Kette
So hab ich in der Stadt etwa 375 bis 400m überbrücken können.
Je nach Lage. Manchmal waren es auch nur 200m.
Es waren Häuser dazwischen, und das Gelände steigt deutlich an.
Ich denke mal, das ist voll OK, da man sonst für die Freq. optische
Sicht braucht. Da kann ich mir dann die angegebenen 1,5 KM auch vorstellen!
So, aber ein Problem bleibt: mein Copter hebt ab, kann ihn links/rechts Vor/Zurück
steuern, ABER er dreht sich immer um sich selbst! Egal, was ich am YAW Hebel mach,
der reagiert genau wie links/rechts. Das Dingens dreht sich alle ~2 oder 3 Sekunden
einmal um sich selbst.
Ich habe den als X konfiguriert, nicht als Plus. Nur aus dem Grunde, daß mein
"kleiner" (Blade Nano QX) auch ein "X" ist.
Ich kann alle 4 Kanäle im Konfig-Programm sehen, und voll aussteuern.
(Balken gehen von null auf voll.)
Habe alle 4 Regler wider in den "Normalzustand" gebracht, sprich original
gebrannt und dann Factory Reset. keine Änderung.
Hatte die FlightControl erst nicht komplett mittig auf der Zentralplatte,
dann nen "Turm" gebaut, und den Acc Chip komplett in die Mitte.
neuer Abgleich - altes verhalten.
Ich krieg die "Drehung" einfach nicht weg *wähhhhhhh*
Sonst ist das Ding echt Sahne, steigt gut, und ist agil.
Aber "Ventilator" spielen sollte er halt nicht.
LG,
Dirk (ratlos)
Leider ist es zu dunkel, um draussen ein Vid zu machen,
musste vorher noch die PA aus dem Proberaum holen,
und im Wohnzimmer ist fliegen (aufzeichnen) aufgrund
der Drehung einfach nicht machbar...!
PS: Beileid zu Deinem Crash! Ich hoffe, das es bald wider
ab in die Lüfte geht
PS/2: Wenn Du Mots/Regler/RX nichtmehr verwenden willst
(neuer QC), ich würd die alten Teile kaufen
Wäre erstens Sicherheit für meinen "Igor1", und würde
die Wartezeit aus China verkürzen.
Zuletzt geändert von Obelix77 am Mi 4. Sep 2013, 00:10, insgesamt 1-mal geändert.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Dann hat ein Motor ne Macke.... => Drehzahlen messen bei etwas unter Schwebegas und ohne Stickinputs !
Hotfix: einfach an der Funke wegtrimmen....
Range Check geht btw so: Funke an, lange auf den Bindknopf drücken, LED blinkt grün. Dann Weglaufen bis es hektisch piepst. Sendet dann nur mit glaub nem 1/100 der Sendeleistung.
Lass die Simonk Firmware auf den ESCs, die können da nix für. Gasweg haste aber eingelernt ?
Hotfix: einfach an der Funke wegtrimmen....
Range Check geht btw so: Funke an, lange auf den Bindknopf drücken, LED blinkt grün. Dann Weglaufen bis es hektisch piepst. Sendet dann nur mit glaub nem 1/100 der Sendeleistung.
Lass die Simonk Firmware auf den ESCs, die können da nix für. Gasweg haste aber eingelernt ?
Re: Quadrocopter Diskussionssthread
OK. Also Regler wider zurück.!
Die Motoren verhalten sich aber alle gleich.
Jeden einzeln am RX drangehangen, und den
Gasweg getestet. Da is alles OK.
Auch die Funktion " beschleunigen bei Arm senken"
ist bei allen 4en da!
Was mich stutzig macht: R/L V/Z geht aber um die
eigene Achse drehen kannn nicht kompensiert werden!
EVTL WAS in der Steuerung falsch?????
LG, Dirk
Die Motoren verhalten sich aber alle gleich.
Jeden einzeln am RX drangehangen, und den
Gasweg getestet. Da is alles OK.
Auch die Funktion " beschleunigen bei Arm senken"
ist bei allen 4en da!
Was mich stutzig macht: R/L V/Z geht aber um die
eigene Achse drehen kannn nicht kompensiert werden!
EVTL WAS in der Steuerung falsch?????
LG, Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
nicht Gasweg testen, EINLERNEN !
Hast du auch mal geguckt, ob der Mittelwert der Sticks in der Gui bei 1500 liegt? Da ist beim Flightcontroller "Mitte", nicht dass du zb 1511 hast, und der dann YAW Input gibt.
Bitte mal Screenshot von deinen PIDs. GGf braucht der mehr I auf der YAW Achse.
ÄÄÄÄHM Moooooment.
Hast du auch mal geguckt, ob der Mittelwert der Sticks in der Gui bei 1500 liegt? Da ist beim Flightcontroller "Mitte", nicht dass du zb 1511 hast, und der dann YAW Input gibt.
Bitte mal Screenshot von deinen PIDs. GGf braucht der mehr I auf der YAW Achse.
ÄÄÄÄHM Moooooment.
Den Satz versteh ich nicht. Driftet die YAW Achse oder reagiert die erst garnicht auf deine Stick Inputs ??So, aber ein Problem bleibt: mein Copter hebt ab, kann ihn links/rechts Vor/Zurück
steuern, ABER er dreht sich immer um sich selbst! Egal, was ich am YAW Hebel mach,
der reagiert genau wie links/rechts. Das Dingens dreht sich alle ~2 oder 3 Sekunden
einmal um sich selbst.
Re: Quadrocopter Diskussionssthread
Icsh kann machen was ich will: Von links nach Rechts fliegen -> OK
Von vorne nach hinten fliegen -> OK
Leider dreht sich der Copter dabei um seine Hochachse,
so wie ein Deckenventilator. Ich kann die Drehung in keiner
Weise beeinflussen!
Von vorne nach hinten fliegen -> OK
Leider dreht sich der Copter dabei um seine Hochachse,
so wie ein Deckenventilator. Ich kann die Drehung in keiner
Weise beeinflussen!
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Also YAW Achse ohne Funktion ? Merkwürdig. Sensoren kalibriert hast du schon? In der GUI muss auf der YAW Achse sich was tun. Dann sollte der auch regeln. Siehst du vom Beschleunigungssensor korrekte Werte in der richtigen Achse ?
Hast du das neueste "dev" genommen oder das stable 2.2 ?
Stimmen die Drehrichtungen der Motoren?
Ich vermute folgendes:
Auf der X- Achse und der Y-Achse müssen immer zwei Gleichläufige Propeller sein (ich rede hier vom + Copter). Wenn du jetzt einmal CW und einmal CCW auf der Achse hast, dann hast du zwar einen Drehmomentausgleich insgesamt, aber wenn der Controller YAW machen will, dreht sowohl ein CW als auch ein CCW Propeller hoch, es passiert nix.
Achja... Mach den Copter ohne Akku an USB, dann GUI starten und Copter armen. Dann siehst du welche Motoren dann bei YAW hochdrehen, das Vergleichst du mit deinem Copter.
Hast du das neueste "dev" genommen oder das stable 2.2 ?
Stimmen die Drehrichtungen der Motoren?
Ich vermute folgendes:
Auf der X- Achse und der Y-Achse müssen immer zwei Gleichläufige Propeller sein (ich rede hier vom + Copter). Wenn du jetzt einmal CW und einmal CCW auf der Achse hast, dann hast du zwar einen Drehmomentausgleich insgesamt, aber wenn der Controller YAW machen will, dreht sowohl ein CW als auch ein CCW Propeller hoch, es passiert nix.
Achja... Mach den Copter ohne Akku an USB, dann GUI starten und Copter armen. Dann siehst du welche Motoren dann bei YAW hochdrehen, das Vergleichst du mit deinem Copter.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Ich hab nochmal etwas gegurgelt....
http://www.rcgroups.com/forums/showthread.php?t=1682575Genau der Fehler wie du ihn auch hast, und genau das Problem was ich beschrieben hab. Alte Teile von meinem defektierten Copter kannste nicht bekommen weil die in einen neuen Copter wandern
http://www.rcgroups.com/forums/showthread.php?t=1682575Genau der Fehler wie du ihn auch hast, und genau das Problem was ich beschrieben hab. Alte Teile von meinem defektierten Copter kannste nicht bekommen weil die in einen neuen Copter wandern
-
Chipbruzzler
- Beiträge: 104
- Registriert: Mo 12. Aug 2013, 20:59
Re: Quadrocopter Diskussionssthread
Also er dreht sich immer?Obelix77 hat geschrieben:Icsh kann machen was ich will: Von links nach Rechts fliegen -> OK
Von vorne nach hinten fliegen -> OK
Leider dreht sich der Copter dabei um seine Hochachse,
so wie ein Deckenventilator. Ich kann die Drehung in keiner
Weise beeinflussen!
Dann weiss ichs
Wenns das nicht ist....schau mal ob die YAW Richtung des Sensors stimmt.
Re: Quadrocopter Diskussionssthread
Das wird es wohl sein. Die beiden rückwärtigen Props sind wohlozonisator hat geschrieben:
Ich vermute folgendes:
Auf der X- Achse und der Y-Achse müssen immer zwei Gleichläufige Propeller sein (ich rede hier vom + Copter). Wenn du jetzt einmal CW und einmal CCW auf der Achse hast, dann hast du zwar einen Drehmomentausgleich insgesamt, aber wenn der Controller YAW machen will, dreht sowohl ein CW als auch ein CCW Propeller hoch, es passiert nix.
falsch. Werd das nach der Arbeit gleich mal andern. Vielen Dank
LG,
Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
µ-Quad lebt !!!
Noch fix den Rahmen zusammenkleben und losfliegen
Noch fix den Rahmen zusammenkleben und losfliegen
Re: Quadrocopter Diskussionssthread
So, Problem behoben
Tolles Teil. Is noch nicht fertig, aber erste lebenszeichen
gibts schon von sich. An dieser Stelle nochmal vielen
Dank für das TUT und die Unterstützung hier in diesem Threat!
IGOR lebt!
LG,
Dirk
Tolles Teil. Is noch nicht fertig, aber erste lebenszeichen
gibts schon von sich. An dieser Stelle nochmal vielen
Dank für das TUT und die Unterstützung hier in diesem Threat!
IGOR lebt!
LG,
Dirk
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
ARGHLÄRKS !
ich hab ja die Regler entkleidet, weil der alte Schrumfpschlauch verpappt war mit Klebebandrückständen und schon giddelig war (Wartungsklappe reingeschnitten etc).
Jetzt wolllte ich die neuen Motoren testen, Motor war angeklemmt, läuft 1A. Dann Gas weg, plötzlich *DI-DU-DI-DU...* Beepcopde. Andauernd rumgefuddelt was das is. Und wieso das kommt.
Ende vom Lied => auf den Atmel datschen => ERROR. Keine Ahnun was der Beepcode sagt, laut SimonK ist das Brownout. Kann ich mir aber absolutest NICHT vorstellen dass VCC vom Atmel droppt.
Und achja, herzlichen Glühstrumpf das deiner nu löppt
ich hab ja die Regler entkleidet, weil der alte Schrumfpschlauch verpappt war mit Klebebandrückständen und schon giddelig war (Wartungsklappe reingeschnitten etc).
Jetzt wolllte ich die neuen Motoren testen, Motor war angeklemmt, läuft 1A. Dann Gas weg, plötzlich *DI-DU-DI-DU...* Beepcopde. Andauernd rumgefuddelt was das is. Und wieso das kommt.
Ende vom Lied => auf den Atmel datschen => ERROR. Keine Ahnun was der Beepcode sagt, laut SimonK ist das Brownout. Kann ich mir aber absolutest NICHT vorstellen dass VCC vom Atmel droppt.
Und achja, herzlichen Glühstrumpf das deiner nu löppt
Re: Quadrocopter Diskussionssthread
Danke
Passen die Fuses von dem Atmel (Brownoutlevel)?
Passen die Fuses von dem Atmel (Brownoutlevel)?
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
An den Fuses hab ich nix gemacht. Ich vermute eher, dass es den Keramikschwinger betrifft. Da in der Gegend ist ds Ding empfindlich. Und durch Kriechströme kann man nicht nen 7805 runterziehen...
Re: Quadrocopter Diskussionssthread
Ja, diese kleinen keramikschwinger sind wirklich sehr empfindlich, das musste ich auch schon feststellen....
Ganz so gut lief es bei mir vorhin nicht:
http://www.youtube.com/watch?v=jejaZWqG ... e=youtu.be
Vorher gemacht:
Die Gaswege aller Regler neu eingelernt.
Die Default werte geladen und eingespielt, und Sensoren kalibriert.

Akkus natürlich Vollgeladen
Achja: die Multi Wii Platine habe ich mit Schaumstoff (Schaltschrankdichtung) auf der Grundplattte befestigt
Ich habe die Vermutung, dieses fuddelige Aluminuim U-Profil ist einfach viel zu wabbelig.
Vielleicht schwingt sich das durch vibrationen auf, und die Rotoren blasen dann zur Seite oder so.
Morgen besorge ich mal was stabileres, dann sehen wir weiter.
Ganz so gut lief es bei mir vorhin nicht:
http://www.youtube.com/watch?v=jejaZWqG ... e=youtu.be
Vorher gemacht:
Die Gaswege aller Regler neu eingelernt.
Die Default werte geladen und eingespielt, und Sensoren kalibriert.

Akkus natürlich Vollgeladen
Achja: die Multi Wii Platine habe ich mit Schaumstoff (Schaltschrankdichtung) auf der Grundplattte befestigt
Ich habe die Vermutung, dieses fuddelige Aluminuim U-Profil ist einfach viel zu wabbelig.
Vielleicht schwingt sich das durch vibrationen auf, und die Rotoren blasen dann zur Seite oder so.
Morgen besorge ich mal was stabileres, dann sehen wir weiter.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Ja das sieht echt so aus. Das sind langsame Oszillationen, typisch für nen wabbeligen Rahmen. U-Profil ist Kacke was die Torsionsfestigkeit anbetrifft.
€dit: starte bitte immer vom Boden aus... Vor allem wenn man Anfänger ist und der Copter noch nicht will.
€dit: starte bitte immer vom Boden aus... Vor allem wenn man Anfänger ist und der Copter noch nicht will.
Re: Quadrocopter Diskussionssthread
Au weia!
Das sieht ja böse aus! Ist der echt von sich aus so zappelig, oder
waren das zu große bewegungen am Knüppel?
(bei meinem Flug hab ich den rechten Knüppel
maximal 2 milimeter aus neutral raus bewegt,
und das war teilweise schon zuviel)
Was macht er denn, wenn man von unten startet?
ich hab mir (von dem kleinen her) angewöhnt, erst wenig Gas
zu geben, dann sieht man, in welche Richtung er will.
Richtung mit rechtem Knüppel ausgleichen, dann gas
zurück und hoch damit.
So wie in deinem Video flog meiner, als die Propeller
noch falsch dran waren. Oder täuscht das mit dem Drehen?
Aber das hab ich nur in paar CM Höhe probiert.
BTW: Ich habe meinen Frame absichtlich etwas äh, naja
stabiler und schwerer gebaut. Einfach, weil das Dingens
dadurch träger wird.
Falls es Dir was bringt: Mittelplatte 12,5 auf 12,5cm, 0,5er Alublech.
Arme einmal 50cm, 2mal 24,2cm 15er Aluvierkant.
Motorplatten 5mal5 CM 0,5er Alublech.
Als "Landegestell" habe ich unten 4 Winkel 15mm*5cm*5cm ausm
Baumarkt drangepoppt. Sicher nicht das "Nonplusultra", aber es tut
soweit seinen Dienst.
LG,
Dirk
Das sieht ja böse aus! Ist der echt von sich aus so zappelig, oder
waren das zu große bewegungen am Knüppel?
(bei meinem Flug hab ich den rechten Knüppel
maximal 2 milimeter aus neutral raus bewegt,
und das war teilweise schon zuviel)
Was macht er denn, wenn man von unten startet?
ich hab mir (von dem kleinen her) angewöhnt, erst wenig Gas
zu geben, dann sieht man, in welche Richtung er will.
Richtung mit rechtem Knüppel ausgleichen, dann gas
zurück und hoch damit.
So wie in deinem Video flog meiner, als die Propeller
noch falsch dran waren. Oder täuscht das mit dem Drehen?
Aber das hab ich nur in paar CM Höhe probiert.
BTW: Ich habe meinen Frame absichtlich etwas äh, naja
stabiler und schwerer gebaut. Einfach, weil das Dingens
dadurch träger wird.
Falls es Dir was bringt: Mittelplatte 12,5 auf 12,5cm, 0,5er Alublech.
Arme einmal 50cm, 2mal 24,2cm 15er Aluvierkant.
Motorplatten 5mal5 CM 0,5er Alublech.
Als "Landegestell" habe ich unten 4 Winkel 15mm*5cm*5cm ausm
Baumarkt drangepoppt. Sicher nicht das "Nonplusultra", aber es tut
soweit seinen Dienst.
LG,
Dirk
Zuletzt geändert von Obelix77 am Mi 4. Sep 2013, 22:41, insgesamt 2-mal geändert.

{kind=link}
Re: Quadrocopter Diskussionssthread
An sich ist der Rahmen von Xanakind ok, nur eben die U-Profile sind zu wabbelig. Mit normalem 10x10mm Vierkant sollte das Problem gelöst sein. Die Ausleger vielleicht auch etwas kürzer machen, macht das Ganze noch etwas steifer. 25cm pro Ausleger reichen selbst bei 10" Propellern.
Schwerbau für trägere Reaktion finde ich widernatürlich. Das zusätzliche Gewicht kostet Flugzeit bzw Nutzlast und den Kopter bekommt man auch durch weniger aggressive PID-Werte gemächlicher.
Schwerbau für trägere Reaktion finde ich widernatürlich. Das zusätzliche Gewicht kostet Flugzeit bzw Nutzlast und den Kopter bekommt man auch durch weniger aggressive PID-Werte gemächlicher.
Re: Quadrocopter Diskussionssthread
Naja, ich seh das so: "Der Zweck heiligt die Mittel".
Mir ist schon klar, daß das nix "endgültiges" ist.
Für den Copter mit Kamera und Pipapo-hassunichgesehn
wird es bestimmt nen neuen Frame geben.
Aber als blutiger Anfänger (der seit 3 Wochen nen Spielzeug
Quad fliegt), ist sowas imho schon OK.
Und - wie man sieht funzt es ja
Und -JA- das kostet Energie. Is klar.
Aber zum lernen tuts das soweit
Das mit den PID Werten ist ein GUTER (!) Tipp, damit habe ich
noch garnicht rumgespielt. Wie gesagt -Anfänger- mit dem
Crashlosen Erstflug heute
LG,
Dirk
Edith sagt: Wenn PID Werte ändern, das der Kopter Anfängertauglicher
fliegt, dann sollte das aber vorher bekanntgemacht werden.
Da braucht´s dann Ersatzparameter, die von den Anfängern
eingelernt werden können.
Wenn Du Dich da so gut auskennst, ergänze bitte das Tutorial
dahingehend.
Mir ist schon klar, daß das nix "endgültiges" ist.
Für den Copter mit Kamera und Pipapo-hassunichgesehn
wird es bestimmt nen neuen Frame geben.
Aber als blutiger Anfänger (der seit 3 Wochen nen Spielzeug
Quad fliegt), ist sowas imho schon OK.
Und - wie man sieht funzt es ja
Und -JA- das kostet Energie. Is klar.
Aber zum lernen tuts das soweit
Das mit den PID Werten ist ein GUTER (!) Tipp, damit habe ich
noch garnicht rumgespielt. Wie gesagt -Anfänger- mit dem
Crashlosen Erstflug heute
LG,
Dirk
Edith sagt: Wenn PID Werte ändern, das der Kopter Anfängertauglicher
fliegt, dann sollte das aber vorher bekanntgemacht werden.
Da braucht´s dann Ersatzparameter, die von den Anfängern
eingelernt werden können.
Wenn Du Dich da so gut auskennst, ergänze bitte das Tutorial
dahingehend.
Re: Quadrocopter Diskussionssthread
Ich hätte mal eine kurze Frage, wenn ich an eine MWC Multiwii ein Bluetooth Modul packe, kann ich alles über mein kluges Phone einstellen und brauche keinen FTDI Adapter für den PC oder ? 
-
Zuckermais
- Beiträge: 71
- Registriert: So 11. Aug 2013, 15:47
Re: Quadrocopter Diskussionssthread
Wenn dein Telefon/Computer SPP kann ja, siehe http://www.elektronik-labor.de/AVR/Bluetooth.html
Zuckermais
Zuckermais
-
Chipbruzzler
- Beiträge: 104
- Registriert: Mo 12. Aug 2013, 20:59
Re: Quadrocopter Diskussionssthread
HI,
ich wollte noch ein paar Worte zum rahmen loswerden:
Viele Materialbelastungstests (lol...auch Abstürze genannt) haben gezeigt, dass folgende Kombo für so kleine Copter optimal ist:
-Alu 10x10mm Vierkantrohr (das leichte ausm Baumarkt...da gibts auch welche mit fetter Wandstärke)
-50cm Motorabstand
-FR4/GFK Mittelteil 10x10cm (Dicke 1,5mm) oben und unten an den Stäben.
-zweite FR4 Platte mit PLASTIKbolzen an der Grundplatte festmachen und dann mit Spiegelklebeband die FC drauf
- Regler an den Armen anbringen für gute Kühlung
- Evtl. GFK Deckplatte zum Schutz der FC
Warum?
Wenn der Copter einschlägt. dann wird die Energie über das ALU auf das GFK in der Mitte geleitet. Dieses kann sich leicht(!) verbiegen und absobiert so den grössten Teil der Energie. So könnt ihr nach einem normalen Einschlag weiter fliegen, insofern die Motoren/Props noch leben.
Die Lagerung der FC über dickes Spiegelklebeband löst 99% aller Vibrationsprobleme
50cm Motorabstand sind für Multiwii irgendwie das beste...fragt mich nicht warum
Was passiert wenn man eine Alugrundplatte verwendet?
Das Alu verbiegt sich (inklusive eurer Ausleger) beim Einschlag. Eure FC wird in der Mitte zerissen wenn sie mit Aludistanzbolzen befestigt war. Der Copter wird nicht mehr weiter fliegen und ihr müsst erstmal alles mechanisch neu aufbauen.
ich wollte noch ein paar Worte zum rahmen loswerden:
Viele Materialbelastungstests (lol...auch Abstürze genannt) haben gezeigt, dass folgende Kombo für so kleine Copter optimal ist:
-Alu 10x10mm Vierkantrohr (das leichte ausm Baumarkt...da gibts auch welche mit fetter Wandstärke)
-50cm Motorabstand
-FR4/GFK Mittelteil 10x10cm (Dicke 1,5mm) oben und unten an den Stäben.
-zweite FR4 Platte mit PLASTIKbolzen an der Grundplatte festmachen und dann mit Spiegelklebeband die FC drauf
- Regler an den Armen anbringen für gute Kühlung
- Evtl. GFK Deckplatte zum Schutz der FC
Warum?
Wenn der Copter einschlägt. dann wird die Energie über das ALU auf das GFK in der Mitte geleitet. Dieses kann sich leicht(!) verbiegen und absobiert so den grössten Teil der Energie. So könnt ihr nach einem normalen Einschlag weiter fliegen, insofern die Motoren/Props noch leben.
Die Lagerung der FC über dickes Spiegelklebeband löst 99% aller Vibrationsprobleme
50cm Motorabstand sind für Multiwii irgendwie das beste...fragt mich nicht warum
Was passiert wenn man eine Alugrundplatte verwendet?
Das Alu verbiegt sich (inklusive eurer Ausleger) beim Einschlag. Eure FC wird in der Mitte zerissen wenn sie mit Aludistanzbolzen befestigt war. Der Copter wird nicht mehr weiter fliegen und ihr müsst erstmal alles mechanisch neu aufbauen.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
So schauts aus. ich bau jetzt meinen Copter Klappbar mit 2mm Carbon Grundplatten. 15mm Alu Vierkant gelocht. Der Kerl mit dem schönen Carbon Copter und der Turbine ist jetzt auch umgestiegen auf Alu Ausleger. Bei einem Crash können die einfach einklappen und so 99% der Wucht absorbieren. Die Carbonrohre knacksen halt ohne Vorwarnung ab, wie am Treffen gesehen. Man braucht nur 4 M4 Schrauben und 2 Grundplatten. Und wenn man die Kabel geschickt verlegt, braucht man nur 1-2 Kabelbinder zu lösen und den Motor abzuschrauben, dann die Schraube in der Grundplatte rausdrehen und schon kann man die Ausleger wechseln.Das Alu verbiegt sich (inklusive eurer Ausleger) beim Einschlag. Eure FC wird in der Mitte zerissen wenn sie mit Aludistanzbolzen befestigt war. Der Copter wird nicht mehr weiter fliegen und ihr müsst erstmal alles mechanisch neu aufbauen.
Re: Quadrocopter Diskussionssthread
Heaterman, Chipbruzzler und ich haben dir schon im alten Forum erklärt dass ein Klapprahmen nix taugt.ich bau jetzt meinen Copter Klappbar mit 2mm Carbon Grundplatten [...] Man braucht nur 4 M4 Schrauben und 2 Grundplatten
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Ich will ja jetzt nicht sagen dass mir ein Ei platzt, aber hast du schon jemals einen Klapprahmen geflogen oder gecrasht oder auch nur in der Hand gehabt ?
Der MK Rahmen zählt nicht, weil die Ausleger nicht richtig geklemmt werden können weil alles ausgefräst ist.
Bitte mal belegen warum und wieso nicht. Einfach nur behaupten zählt nicht!
Btw, Besagter Fliegerkollege hat jetzt schon mehrere Quadrocopter komplett selbst aus CFK geschnitzt, laminiert, und gecrasht. Hat ne Bine selbst gebaut und heizt mit solch einem http://www.hoelleinshop.com/Flugmodelle ... 23&p=12623 Geschoss mit über 320 durch die Gegend. => Der Kerl hat Erfahrung ohne Ende. Und wenn der mir sagt dass das funzt, dann ist das auch so.
Und ich sehe auch kein Problem darin warum das nicht klappen soll. Die Arme werden in Klapprichtung nur durch Yaw-Drehmomente belastet, und die sind bei Quads eher vernachlässigbar. Mein letzter Quad ist auch ohne die die "Einklappsicherung" bestens geflogen. Und einmal hab ich den mit ca 25° und 30-40kmh schräg in den Boden gerammt, wärn die Arme fest dran gewesen dann wärn die jetzt krumm gewesen. Nur weil ich die M3 Löcher mit Akkuschrauber (und damit total schief und krumm) gebohrt hab, konnten die Arme etwas nachgeben und leicht einklappen. Klappt wunderprächtig.
Einzigste was ich ggf machen werde, ist eine Art Hülse anzufertigen, die über die Ausleger geht und in die Centerplates einrasten kann. Quasi wie bei Zeltstangen. Vermutlich nur 2 Streifen CFK mit Nylon Diszanthülsen. Das kann dann bei einem Crash abfliegen ohne das was passiert.
Der MK Rahmen zählt nicht, weil die Ausleger nicht richtig geklemmt werden können weil alles ausgefräst ist.
Bitte mal belegen warum und wieso nicht. Einfach nur behaupten zählt nicht!
Btw, Besagter Fliegerkollege hat jetzt schon mehrere Quadrocopter komplett selbst aus CFK geschnitzt, laminiert, und gecrasht. Hat ne Bine selbst gebaut und heizt mit solch einem http://www.hoelleinshop.com/Flugmodelle ... 23&p=12623 Geschoss mit über 320 durch die Gegend. => Der Kerl hat Erfahrung ohne Ende. Und wenn der mir sagt dass das funzt, dann ist das auch so.
Und ich sehe auch kein Problem darin warum das nicht klappen soll. Die Arme werden in Klapprichtung nur durch Yaw-Drehmomente belastet, und die sind bei Quads eher vernachlässigbar. Mein letzter Quad ist auch ohne die die "Einklappsicherung" bestens geflogen. Und einmal hab ich den mit ca 25° und 30-40kmh schräg in den Boden gerammt, wärn die Arme fest dran gewesen dann wärn die jetzt krumm gewesen. Nur weil ich die M3 Löcher mit Akkuschrauber (und damit total schief und krumm) gebohrt hab, konnten die Arme etwas nachgeben und leicht einklappen. Klappt wunderprächtig.
Einzigste was ich ggf machen werde, ist eine Art Hülse anzufertigen, die über die Ausleger geht und in die Centerplates einrasten kann. Quasi wie bei Zeltstangen. Vermutlich nur 2 Streifen CFK mit Nylon Diszanthülsen. Das kann dann bei einem Crash abfliegen ohne das was passiert.
-
Chipbruzzler
- Beiträge: 104
- Registriert: Mo 12. Aug 2013, 20:59
Re: Quadrocopter Diskussionssthread
Der "Klapprahmen" ausm alten Forum hätte definitiv nichts getaugt....
Wenn man einen Klapprahmen GUT baut, dann hält der fast genausoviel aus wie ien normaler Rahmen. Ich hab selber 2 Stück
Wenn man einen Klapprahmen GUT baut, dann hält der fast genausoviel aus wie ien normaler Rahmen. Ich hab selber 2 Stück
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Du wirst es kaum glauben, aber wenn man am alten Rahmen die zentralen M4 Bolzen etwas anzieht, dann muss man richtig kräftig dran drücken damit sich da was bewegt... Ich glaub ich lad morgen mal meine ersten Zeichnungen hoch, damit man sich mal ein Bild machen kann.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
http://files.brauchmer.net/imghost/up/2 ... 62f617.jpg
So sieht der erste Entwurf aus. Vertikal zwischen den Reglern geht dann ein Streifen doppelseitiges Platinenmaterial durch für Stromverteilung. Dann obendrauf nochmal 2,3mm Carbon und da drauf dann FC, BMP085 und Empfänger.
{kind=link}
So sieht der erste Entwurf aus. Vertikal zwischen den Reglern geht dann ein Streifen doppelseitiges Platinenmaterial durch für Stromverteilung. Dann obendrauf nochmal 2,3mm Carbon und da drauf dann FC, BMP085 und Empfänger.
Re: Quadrocopter Diskussionssthread
Es geht nun weiter!
Ich habe die Arme nun durch 4 Kant Rohr ersetzt.
die alten waren wirklich viel zu unstabil (war auch nur 8mm)

von den wenigen unsanften Landungen ist das Gelumpe total Krumm.
Dann die neuen Ausleger zugeschnitten, gebohrt:

und alles wieder zusammengebaut:

Dann ab ins Feld gegurkt und:
http://www.youtube.com/watch?v=LkR5h6LJoik
ist zwar noch leicht weggedriftet (was aber eher am Wind liegen wird), was sich aber sehr ausgleichen lies.
Es ist echt beeindruckend, wie Giftig das Teil am Gas hängt.
eine kurze volle Lenkbewegung, und der steht senkrecht in der Luft
Wahnsinn, wie genau die Bewegungen am Knüppel umgesetzt werden.
Ich habe die Arme nun durch 4 Kant Rohr ersetzt.
die alten waren wirklich viel zu unstabil (war auch nur 8mm)

von den wenigen unsanften Landungen ist das Gelumpe total Krumm.
Dann die neuen Ausleger zugeschnitten, gebohrt:

und alles wieder zusammengebaut:

Dann ab ins Feld gegurkt und:
http://www.youtube.com/watch?v=LkR5h6LJoik
ist zwar noch leicht weggedriftet (was aber eher am Wind liegen wird), was sich aber sehr ausgleichen lies.
Es ist echt beeindruckend, wie Giftig das Teil am Gas hängt.
eine kurze volle Lenkbewegung, und der steht senkrecht in der Luft
Wahnsinn, wie genau die Bewegungen am Knüppel umgesetzt werden.
-
ozonisator
- Beiträge: 1653
- Registriert: So 11. Aug 2013, 19:53
- Wohnort: bei Frankfurt/Main
Re: Quadrocopter Diskussionssthread
Du kannst dir Expo in Roll und Pitch legen, dann reagiert er zahmer. Das geht in der Gui bei dem grünen Graphen. Einfach Expo verändern und die Kurve flacher machen.
Kann sich doch sehen lassen
Ach noch 2 Sachen: Überrollkäfig für die Elektronik ist praktisch, und das gaffatape saut dir die Regler ein mit ekelhaftestem Papp *würg*
Kann sich doch sehen lassen
Ach noch 2 Sachen: Überrollkäfig für die Elektronik ist praktisch, und das gaffatape saut dir die Regler ein mit ekelhaftestem Papp *würg*
-
Chipbruzzler
- Beiträge: 104
- Registriert: Mo 12. Aug 2013, 20:59
Re: Quadrocopter Diskussionssthread
HF-mäßig wirst du mit GFK mehr Spaß habenozonisator hat geschrieben:http://files.brauchmer.net/imghost/up/2 ... 62f617.jpg
So sieht der erste Entwurf aus. Vertikal zwischen den Reglern geht dann ein Streifen doppelseitiges Platinenmaterial durch für Stromverteilung. Dann obendrauf nochmal 2,3mm Carbon und da drauf dann FC, BMP085 und Empfänger.
Mach ne Vertiefung in die Centerplates rein wo die Ausleger einrasten können. So ne simple Verschraubung hält vllt kampfschweben aus, aber nie Loopings,Rollen und andere Manöver.